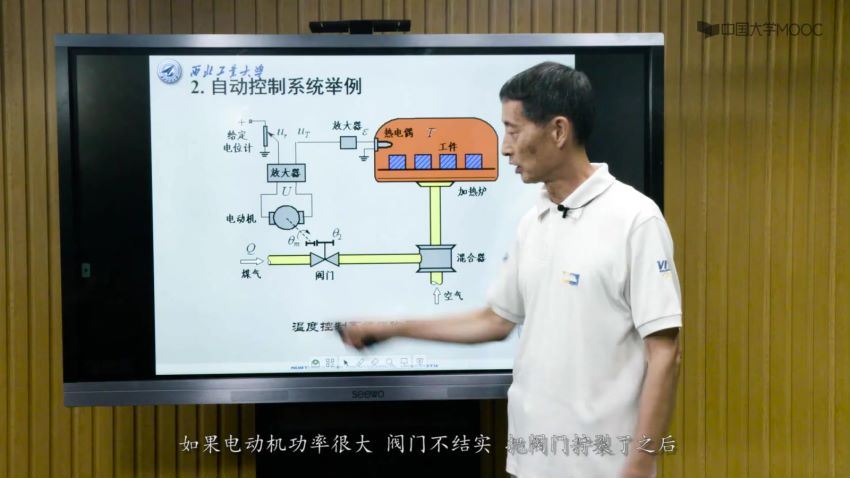
本套课程:自动控制原理_西北工业大学,课程大小共15.00G,文章底部附下载地址,下载方式为百度网盘,如链接失效,请在页面下方评论,将及时处理。
课程文件目录
自动控制原理_西北工业大学 [14.97G]
{1}–课程 [14.97G]
{1}–第一周第一章自动控制的一般概念 [0.99G]
{1}–第一节自动控制的概念 [289.97M]
(1.1.1)–第一章第一节自动控制的概念.pdf [372.21K]
[1.1.1]–第一章第一节自动控制的概念.mp4 [289.60M]
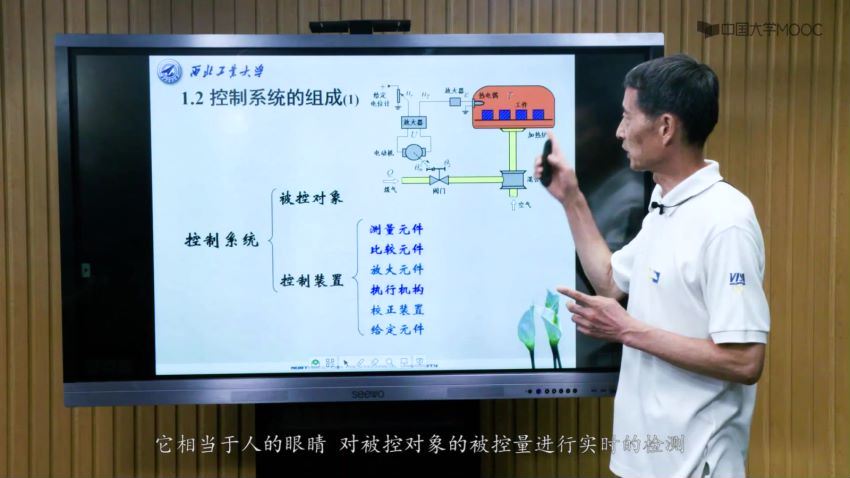
{2}–第二节自动控制的组成分类及要求 [287.63M]
(1.2.1)–第二节自动控制的组成分类及要求.pdf [218.87K]
[1.2.1]–第二节自动控制的组成分类及要求.mp4 [287.41M]
{3}–第三节控制理论发展历程 [439.81M]
(1.3.1)–第一章第三节控制理论发展历程.pdf [791.55K]
[1.3.1]–第一章第三节控制理论发展历程.mp4 [439.04M]
{10}–第十周第五章线性系统的频域分析与校正 [938.48M]
{1}–第五节对数频率特性(下) [226.53M]
(10.1.1)–第五节对数频率特性(下).pdf [439.31K]
[10.1.1]–第五节对数频率特性(下).mp4 [226.10M]
{2}–第六节频域稳定判据(上) [252.19M]
(10.2.1)–第六节频域稳定判据(上).pdf [564.85K]
[10.2.1]–第六节频域稳定判据(上).mp4 [251.64M]
{3}–第七节频域稳定判据(下) [230.92M]
(10.3.1)–第七节频域稳定判据(下).pdf [566.91K]
[10.3.1]–第七节频域稳定判据(下).mp4 [230.37M]
{4}–第八节稳定裕度 [228.84M]
(10.4.1)–第八节稳定裕度.pdf [423.25K]
[10.4.1]–第八节稳定裕度.mp4 [228.43M]
{11}–第十一周第五章线性系统的频域分析与校正 [567.04M]
{1}–第九节利用开环频率特性分析系统的性能(上) [75.83M]
(11.1.1)–第九节利用开环频率特性分析系统的性能(上.pdf [529.66K]
[11.1.1]–第九节利用开环频率特性分析系统的性能(上.mp4 [75.31M]
{2}–第十节利用开环频率特性分析系统的性能(下) [64.27M]
(11.2.1)–第十节利用开环频率特性分析系统的性能(下).pdf [491.88K]
[11.2.1]–第十节利用开环频率特性分析系统的性能(下).mp4 [63.79M]
{3}–第十一节利用闭环频率特性分析系统的性能 [44.10M]
(11.3.1)–第十一节利用闭环频率特性分析系统的性能.pdf [384.78K]
[11.3.1]–第十一节利用闭环频率特性分析系统的性能.mp4 [43.72M]
{4}–第十二节频率法串联校正——超前校正 [382.84M]
(11.4.1)–第十二节频率法串联校正——超前校正.pdf [543.94K]
[11.4.1]–第十二节频率法串联校正——超前校正.mp4 [382.30M]
{12}–第十二周第五章线性系统的频域分析与校正 [413.20M]
{1}–第十三节频率法串联校正——迟后校正 [146.35M]
(12.1.1)–第十三节频率法串联校正——迟后校正.pdf [648.31K]
[12.1.1]–第十三节频率法串联校正——迟后校正.mp4 [145.72M]
{2}–第十四节频率法串联校正——迟后超前校正 [48.01M]
(12.2.1)–第十四节频率法串联校正——迟后超前校正.pdf [576.27K]
[12.2.1]–第十四节频率法串联校正——迟后超前校正.mp4 [47.45M]
{3}–第十五节频率法串联校正——希望特性校正方法 [218.84M]
(12.3.1)–第十五节频率法串联校正——希望特性校正方法.pdf [905.46K]
[12.3.1]–第十五节频率法串联校正——希望特性校正方法.mp4 [217.96M]
{13}–前五章测试 [0.00K]
{14}–第十三周第六章线性离散系统的分析与校正 [1.07G]
{1}–第一节离散系统 [158.86M]
(14.1.1)–第一节离散系统.pdf [1.01M]
[14.1.1]–第一节离散系统.mp4 [157.86M]
{2}–第二节信号采样与保持 [192.92M]
(14.2.1)–第二节信号采样与保持.pdf [1.11M]
[14.2.1]–第二节信号采样与保持.mp4 [191.80M]
{3}–第三节z变换 [223.34M]
(14.3.1)–第三节z变换.pdf [682.80K]
[14.3.1]–第三节z变换.mp4 [222.67M]
{4}–第四节离散系统数学模型1 [213.90M]
(14.4.1)–第四节离散系统数学模型1.pdf [557.98K]
[14.4.1]–第四节离散系统数学模型1.mp4 [213.36M]
{5}–第五节离散系统数学模型2 [310.77M]
(14.5.1)–第五节离散系统数学模型2.pdf [961.51K]
[14.5.1]–第五节离散系统数学模型2.mp4 [309.83M]
{15}–期末考试 [0.00K]
{16}–第十四周第六章线性离散系统的分析与校正 [1.26G]
{1}–第六节稳定性分析 [312.02M]
(16.1.1)–第六节稳定性分析.pdf [1.03M]
[16.1.1]–第六节稳定性分析.mp4 [311.00M]
{2}–第七节稳态误差计算 [237.49M]
(16.2.1)–第七节稳态误差计算.pdf [950.26K]
[16.2.1]–第七节稳态误差计算.mp4 [236.56M]
{3}–第八节动态性能分析 [266.92M]
(16.3.1)–第八节动态性能分析.pdf [1.39M]
[16.3.1]–第八节动态性能分析.mp4 [265.53M]
{4}–第九节离散系统模拟化设计 [260.08M]
(16.4.1)–第九节离散系统模拟化设计.pdf [1.08M]
[16.4.1]–第九节离散系统模拟化设计.mp4 [259.00M]
{5}–第十节离散系统的数字校正 [209.00M]
(16.5.1)–第十节离散系统的数字校正.pdf [932.15K]
[16.5.1]–第十节离散系统的数字校正.mp4 [208.09M]
{17}–第十五周第七章非线性控制系统分析 [1.66G]
{1}–第一节非线性系统概述 [254.44M]
(17.1.1)–第一节非线性系统概述.pdf [1.77M]
[17.1.1]–第一节非线性系统概述.mp4 [252.67M]
{2}–第二节相平面法1 [275.27M]
(17.2.1)–第二节相平面法1.pdf [878.40K]
[17.2.1]–第二节相平面法1.mp4 [274.42M]
{3}–第三节相平面法2 [331.00M]
(17.3.1)–第三节相平面法2.pdf [1.83M]
[17.3.1]–第三节相平面法2.mp4 [329.16M]
{4}–第四节描述函数法1 [217.67M]
(17.4.1)–第四节描述函数法1.pdf [858.78K]
[17.4.1]–第四节描述函数法1.mp4 [216.83M]
{5}–第五节描述函数法2 [134.71M]
(17.5.1)–第五节描述函数法2.pdf [593.20K]
[17.5.1]–第五节描述函数法2.mp4 [134.13M]
{6}–第六节描述函数法3 [295.17M]
(17.6.1)–第六节描述函数法3.pdf [1.18M]
[17.6.1]–第六节描述函数法3.mp4 [293.99M]
{7}–第七节改善非线性系统性能的措施 [188.54M]
(17.7.1)–第七节改善非线性系统性能的措施.pdf [1.59M]
[17.7.1]–第七节改善非线性系统性能的措施.mp4 [186.95M]
{2}–第二周第二章控制系统的数学模型 [1.00G]
{1}–第一节控制系统的时域模型 [199.50M]
(2.1.1)–第一节控制系统的时域模型.pdf [523.76K]
[2.1.1]–第一节控制系统的时域模型.mp4 [198.99M]
{2}–第二节控制系统的复域模型 [273.29M]
(2.2.1)–第二节控制系统的复域模型.pdf [523.89K]
[2.2.1]–第二节控制系统的复域模型.mp4 [272.77M]
{3}–第三节系统的模态 [81.10M]
(2.3.1)–第三节系统的模态.pdf [678.80K]
[2.3.1]–第三节系统的模态.mp4 [80.43M]
{4}–第四节结构图等效化简 [467.82M]
(2.4.1)–第四节结构图等效化简.pdf [657.75K]
[2.4.1]–第四节结构图等效化简.mp4 [467.17M]
{3}–第三周第二章控制系统的数学模型 [761.13M]
{1}–第五节信号流图及其与结构图的关系 [194.23M]
(3.1.1)–第五节信号流图及其与结构图的关系.pdf [424.46K]
[3.1.1]–第五节信号流图及其与结构图的关系.mp4 [193.82M]
{2}–第六节梅森公式 [336.86M]
(3.2.1)–第六节梅森公式.pdf [621.18K]
[3.2.1]–第六节梅森公式.mp4 [336.25M]
{3}–第七节控制系统的传递函数 [230.04M]
(3.3.1)–第七节控制系统的传递函数.pdf [415.59K]
[3.3.1]–第七节控制系统的传递函数.mp4 [229.64M]
{4}–第四周第三章线性系统的时域分析与校正 [926.46M]
{1}–第一节时域法概述、一阶系统的时间响应及动态性能 [222.47M]
(4.1.1)–第一节时域法概述、一阶系统的时间响应及动态性能.pdf [678.32K]
[4.1.1]–第一节时域法概述、一阶系统的时间响应及动态性能.mp4 [221.81M]
{2}–第二节二阶系统时间响应及动态性能指标(过阻尼和临界阻尼二阶系统) [218.92M]
(4.2.1)–第二节过阻尼和临界阻尼二阶系统.pdf [562.47K]
[4.2.1]–第二节过阻尼和临界阻尼二阶系统.mp4 [218.37M]
{3}–第三节二阶系统时间响应及动态性能指标(欠阻尼二阶系统) [265.81M]
(4.3.1)–第三节欠阻尼二阶系统.pdf [663.25K]
[4.3.1]–第三节欠阻尼二阶系统.mp4 [265.16M]
{4}–第四节欠阻尼二阶系统动态性能随闭环极点位置变化规律 [219.26M]
(4.4.1)–第四节欠阻尼二阶系统动态性能随闭环极点位置变化规律.pdf [419.45K]
[4.4.1]–第四节欠阻尼二阶系统动态性能随闭环极点位置变化规律.mp4 [218.85M]
{5}–第五周第三章线性系统的时域分析与校正 [1.09G]
{1}–第五节改善二阶系统动态性能的措施 [248.37M]
(5.1.1)–第五节改善二阶系统动态性能的措施.pdf [428.96K]
[5.1.1]–第五节改善二阶系统动态性能的措施.mp4 [247.95M]
{2}–第六节线性系统的稳定性分析 [380.38M]
(5.2.1)–第六节线性系统的稳定性分析.pdf [469.88K]
[5.2.1]–第六节线性系统的稳定性分析.mp4 [379.92M]
{3}–第七节线性系统的稳态误差分析(一般方法) [183.59M]
(5.3.1)–第七节线性系统的稳态误差分析(一般方法).pdf [348.87K]
[5.3.1]–第七节线性系统的稳态误差分析(一般方法).mp4 [183.25M]
{4}–第八节静态误差系数法、干扰作用引起的稳态误差分析 [308.54M]
(5.4.1)–第八节静态误差系数法、干扰作用引起的稳态误差分析.pdf [479.12K]
[5.4.1]–第八节静态误差系数法、干扰作用引起的稳态误差分析.mp4 [308.07M]
{6}–第六周第三章线性系统的时域分析与校正 [312.03M]
{1}–第九节线性系统的时域校正、第三章小结 [312.03M]
(6.1.1)–第九节线性系统的时域校正、第三章小结.pdf [555.49K]
[6.1.1]–第九节线性系统的时域校正、第三章小结.mp4 [311.49M]
{7}–第七周第四章根轨迹法 [1.66G]
{1}–第一节根轨迹法的基本概念(1) [235.40M]
(7.1.1)–第一节根轨迹法的基本概念(1).pdf [583.97K]
[7.1.1]–第一节根轨迹法的基本概念(1).mp4 [234.83M]
{2}–第二节根轨迹法的基本概念(2) [258.22M]
(7.2.1)–第二节根轨迹法的基本概念(2).pdf [607.19K]
[7.2.1]–第二节根轨迹法的基本概念(2).mp4 [257.63M]
{3}–第三节绘制根轨迹的基本法则(1) [417.37M]
(7.3.1)–第三节绘制根轨迹的基本法则(1).pdf [640.73K]
[7.3.1]–第三节绘制根轨迹的基本法则(1).mp4 [416.75M]
{4}–第四节绘制根轨迹的基本法则(2) [458.61M]
(7.4.1)–第四节绘制根轨迹的基本法则(2).pdf [608.89K]
[7.4.1]–第四节绘制根轨迹的基本法则(2).mp4 [458.02M]
{5}–第五节绘制根轨迹的基本法则(3) [328.97M]
(7.5.1)–第五节绘制根轨迹的基本法则(3).pdf [846.74K]
[7.5.1]–第五节绘制根轨迹的基本法则(3).mp4 [328.14M]
{8}–第八周第四章根轨迹法 [1.29G]
{1}–第六节广义根轨迹(1) [300.67M]
(8.1.1)–第六节广义根轨迹(1).pdf [684.26K]
[8.1.1]–第六节广义根轨迹(1).mp4 [300.00M]
{2}–第七节广义根轨迹(2) [329.52M]
(8.2.1)–第七节广义根轨迹(2).pdf [640.59K]
[8.2.1]–第七节广义根轨迹(2).mp4 [328.89M]
{3}–第八节利用根轨迹分析系统性能 [334.87M]
(8.3.1)–第八节利用根轨迹分析系统性能.pdf [904.84K]
[8.3.1]–第八节利用根轨迹分析系统性能.mp4 [333.98M]
{4}–第九节利用根轨迹法设计系统 [352.67M]
(8.4.1)–第九节利用根轨迹法设计系统.pdf [629.12K]
[8.4.1]–第九节利用根轨迹法设计系统.mp4 [352.06M]
{9}–第九周第五章线性系统的频域分析与校正 [1.13G]
{1}–第一节频率特性的基本概念 [87.88M]
(9.1.1)–第一节频率特性的基本概念.pdf [494.78K]
[9.1.1]–第一节频率特性的基本概念.mp4 [87.40M]
{2}–第二节幅相频率特性(上) [495.38M]
(9.2.1)–第二节幅相频率特性(上).pdf [888.92K]
[9.2.1]–第二节幅相频率特性(上).mp4 [494.51M]
{3}–第三节幅相频率特性(下) [388.26M]
(9.3.1)–第三节幅相频率特性(下).pdf [384.00K]
[9.3.1]–第三节幅相频率特性(下).mp4 [387.89M]
{4}–第四节对数频率特性(上) [184.87M]
(9.4.1)–第四节对数频率特性(上).pdf [484.24K]
[9.4.1]–第四节对数频率特性(上).mp4 [184.39M]
dpl_pyjun [14.05K]
播放列表.dpl [14.05K]
修复播放列表.bat [0.17K]
(1.1.1)–第一章第一节自动控制的概念.pdf [372.21K]
(1.2.1)–第二节自动控制的组成分类及要求.pdf [218.87K]
(1.3.1)–第一章第三节控制理论发展历程.pdf [791.55K]
(10.1.1)–第五节对数频率特性(下).pdf [439.31K]
(10.2.1)–第六节频域稳定判据(上).pdf [564.85K]
(10.3.1)–第七节频域稳定判据(下).pdf [566.91K]
(10.4.1)–第八节稳定裕度.pdf [423.25K]
(11.1.1)–第九节利用开环频率特性分析系统的性能(上.pdf [529.66K]
(11.2.1)–第十节利用开环频率特性分析系统的性能(下).pdf [491.88K]
(11.3.1)–第十一节利用闭环频率特性分析系统的性能.pdf [384.78K]
(11.4.1)–第十二节频率法串联校正——超前校正.pdf [543.94K]
(12.1.1)–第十三节频率法串联校正——迟后校正.pdf [648.31K]
(12.2.1)–第十四节频率法串联校正——迟后超前校正.pdf [576.27K]
(12.3.1)–第十五节频率法串联校正——希望特性校正方法.pdf [905.46K]
(14.1.1)–第一节离散系统.pdf [1.01M]
(14.2.1)–第二节信号采样与保持.pdf [1.11M]
(14.3.1)–第三节z变换.pdf [682.80K]
(14.4.1)–第四节离散系统数学模型1.pdf [557.98K]
(14.5.1)–第五节离散系统数学模型2.pdf [961.51K]
(2.1.1)–第一节控制系统的时域模型.pdf [523.76K]
(2.2.1)–第二节控制系统的复域模型.pdf [523.89K]
(2.3.1)–第三节系统的模态.pdf [678.80K]
(2.4.1)–第四节结构图等效化简.pdf [657.75K]
(3.1.1)–第五节信号流图及其与结构图的关系.pdf [424.46K]
(3.2.1)–第六节梅森公式.pdf [621.18K]
(3.3.1)–第七节控制系统的传递函数.pdf [415.59K]
(4.1.1)–第一节时域法概述、一阶系统的时间响应及动态性能.pdf [678.32K]
(4.2.1)–第二节过阻尼和临界阻尼二阶系统.pdf [562.47K]
(4.3.1)–第三节欠阻尼二阶系统.pdf [663.25K]
(4.4.1)–第四节欠阻尼二阶系统动态性能随闭环极点位置变化规律.pdf [419.45K]
(5.1.1)–第五节改善二阶系统动态性能的措施.pdf [428.96K]
(5.2.1)–第六节线性系统的稳定性分析.pdf [469.88K]
(5.3.1)–第七节线性系统的稳态误差分析(一般方法).pdf [348.87K]
(5.4.1)–第八节静态误差系数法、干扰作用引起的稳态误差分析.pdf [479.12K]
(6.1.1)–第九节线性系统的时域校正、第三章小结.pdf [555.49K]
(7.1.1)–第一节根轨迹法的基本概念(1).pdf [583.97K]
(7.2.1)–第二节根轨迹法的基本概念(2).pdf [607.19K]
(7.3.1)–第三节绘制根轨迹的基本法则(1).pdf [640.73K]
(7.4.1)–第四节绘制根轨迹的基本法则(2).pdf [608.89K]
(7.5.1)–第五节绘制根轨迹的基本法则(3).pdf [846.74K]
(8.1.1)–第六节广义根轨迹(1).pdf [684.26K]
(8.2.1)–第七节广义根轨迹(2).pdf [640.59K]
(8.3.1)–第八节利用根轨迹分析系统性能.pdf [904.84K]
(8.4.1)–第九节利用根轨迹法设计系统.pdf [629.12K]
(9.1.1)–第一节频率特性的基本概念.pdf [494.78K]
(9.2.1)–第二节幅相频率特性(上).pdf [888.92K]
(9.3.1)–第三节幅相频率特性(下).pdf [384.00K]
(9.4.1)–第四节对数频率特性(上).pdf [484.24K]
课程下载地址:
VIP用户免费下载,下载链接为百度云网盘,点击下方按钮即可,内容请先保存到自己网盘里,随后可以在线看也可以下载保存。

评论0